Create a free profile to get unlimited access to exclusive videos, sweepstakes, and more!
This next-gen rover prototype reinvents the wheel to avoid pesky Martian sand traps

The level of constant innovation, evolution, and adaptation involved in designing the next generation of space exploration spacecraft, interplanetary probes, and landing vehicles is nothing short of remarkable and explicitly point to Mankind's indomitable spirit of discovery.
As the world eyes the sandy worlds of Moon and Mars as our next scientific destinations leading into the deep reaches of the decade, new machines are popping up to make these upcoming missions as successful as possible through the use of technology and simple old-fashioned ingenuity. Meet a new wiggle-wheeled Mini-Rover model rolling out of the Georgia Institute of Technology designed to reflect those ideals and better navigate rolling hills and loose soils!

For their scaled-down prototype, Dunn Family Professor Dan Goldman of Georgia Tech's School of Physics and his student team including Siddharth Shrivastava, Yasemin Ozkan-Aydin, Andras Karsai, and others collaborated directly with NASA's Robert Ambrose and William Bluethmann and even took an excursion out to NASA Johnson Space Center in Houston to get a more intimate look at the real-life NASA RP15 rover.
This Georgia Tech version employs multifunctional appendages capable of spinning wheels that can be "wiggled" and lifted up if the planetary exploration robot gets stuck in fine sand, granular mounds, or clumping dirt that would impede its progress. Georgia Tech's Mini Rover was fashioned after a unique NASA rover design and was tested in the lab to develop and investigate fresh locomotion techniques that would aid in its ability to clamber up hills piled high with powdery regolith material.
"When loose materials flow, that can create problems for robots moving across it," explained Dan Goldman to TechXplore. "This rover has enough degrees of freedom that it can get out of jams pretty effectively. By avalanching materials from the front wheels, it creates a localized fluid hill for the back wheels that is not as steep as the real slope. The rover is always self-generating and self-organizing a good hill for itself."
Goldman and his team's findings were supported by the NASA National Robotics Initiative and the Army Research Office and were showcased in a cover article of the May 13th issue of the online journal, Science Robotics.
According to the paper, planetary rovers face a multitude of challenges in soft regolith while roaming extraterrestrial territory.
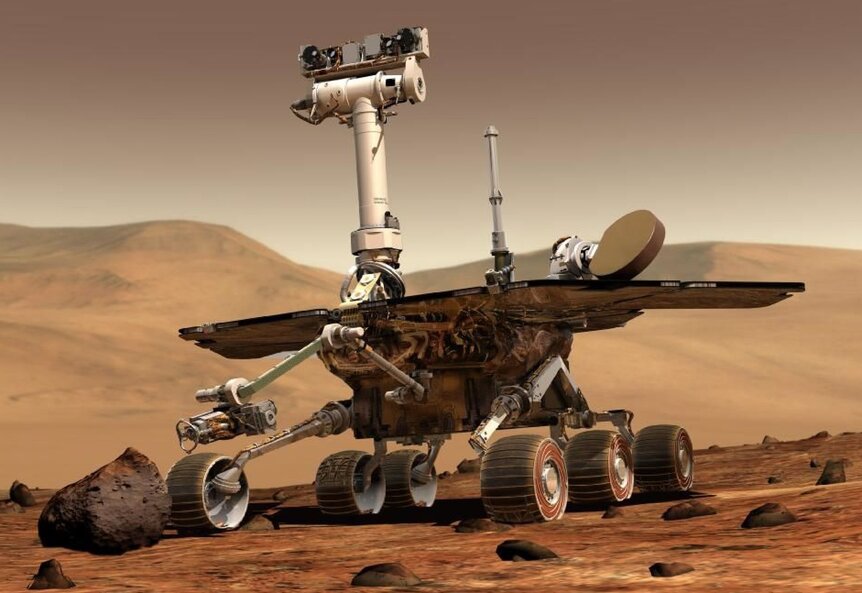
In 2010, after six years of impressive discoveries and experiments, NASA’s Mars Exploration Rover Spirit became infamously stuck in a Martian sand trap after sinking into low cohesion sulfate sands of Troy near the Gusev crater. The six-wheeled Spirit was part of NASA's $800 million Mars Exploration Rover (MER) mission that launched back in 2003. Spirit stopped relaying data back to Earth on March 22, 2010. Its sister rover, Opportunity, functioned until June 2018 when it was unable to recharge its solar batteries because of severe dust storms.

Those mobility challenges forced scientists at NASA Johnson Space Center to develop a prototype robotic rover named Resource Prospector 15 (RP15), a vehicle demonstrating wheeled, legged, and crawling behavior. To further understand the terradynamic capabilities of such a machine, Georgia Tech's crew built a scaled-down rover robot to scrutinize its complex locomotion on inclines of dry and wet granular surfaces. Their addition of a cyclic-legged gait to the vehicle's wheel spinning alters the rover's function as a wheeled vehicle to a locomotor paddling instrument through frictional fluid, allowing it to “swim” up slippery hills operating in a philosophy of physics known as terradynamics. RP15 is slated to launch on a lunar mission in 2021.
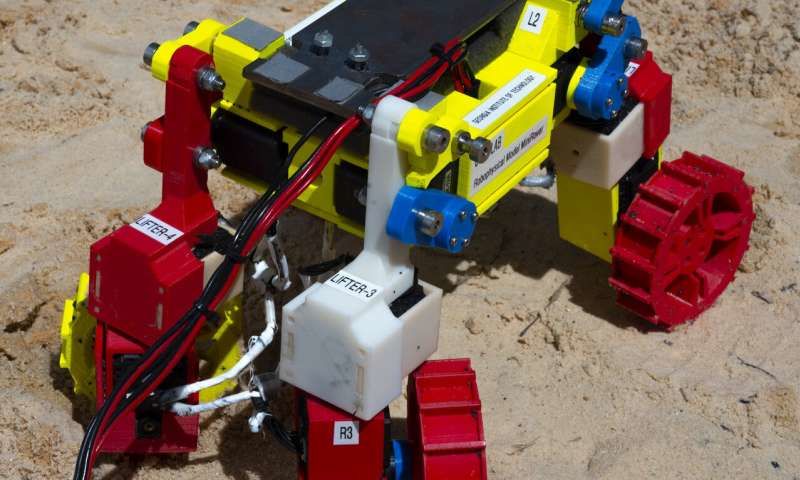
Utilizing a sophisticated concept called "rear rotator pedaling," this mighty little Mini Rover can tackle a slope using a unique combination of movements blending elements of paddling, striding, stepping, and wheel spinning motions, thus hoping to avoid Spirit's sad fate on the Red Planet.
"In our previous studies of pure legged robots, modeled on animals, we had kind of figured out that the secret was to not make a mess," said Goldman. "If you end up making too much of a mess with most robots, you end up just paddling and digging into the granular material. If you want fast locomotion, we found that you should try to keep the material as solid as possible by tweaking the parameters of motion.
"This combination of lifting and wheeling and paddling, if used properly, provides the ability to maintain some forward progress even if it is slow. Through our laboratory experiments, we have shown principles that could lead to improved robustness in planetary exploration—and even in challenging surfaces on our own planet."