Create a free profile to get unlimited access to exclusive videos, sweepstakes, and more!
German scientists apply all-body e-skin to autonomous humanoid robot

Having the ability to accurately experience the sensation of human touch is something many androids dream of after counting their electric sheep at night. Just ask Star Trek: TNG's Data after the Borg Queen seductively ripples the fine hairs on his newly applied artificial skin in 1996's Star Trek: First Contact!
Hoping to replicate similar sensory input in the field of robotics, a team of researchers at Germany's Technische Universität München has devised a new system of electronic skin that might aid artificial humans in processing and reproducing that most elemental feeling as robotics advance into the next generation.
Details of the scientists' touchable e-skin was recently delivered in a paper published in MDPI's Sensors online journal. The crew's method of covering an android's body with small circular sensors utilizes a fraction of the computer juice power needed for alternate types of existing e-skins and can thus be applied to larger portions of a robot's body.
"Our main motivation for developing the e-skin stems from nature and is centered on the question of how we humans interact with our surrounding environment," lead study co-author Florian Bergner told TechXplore. "While humans predominantly depend on vision, our sense of touch is important as soon as contacts are involved in interactions. We believe that giving robots a sense of touch can extend the range of interactions between robots and humans—making robots more collaborative, safe and effective."
Overseen by the university's Prof. Gordon Cheng, Bergner and his team are very famiiar with e-skin technology and have been closely involved in advancing the tech for nearly a decade. Initially, they tried to craft e-skin systems with multi-modal sensing capabilities similar to human skin. One of their goals was to invent artificial skin that could sense gentle touch, pressure variations, temperature changes, and subtle vibrations, while relocating its sensory input across different bodily regions where these tactile spots occurred.
"Humans cannot only discern between different kind of touches but also where they occur," Bergner added. "In addition to replicating this ability, an e-skin system should sustain physical stress of contacts, be scalable and support integration with minimal effort."
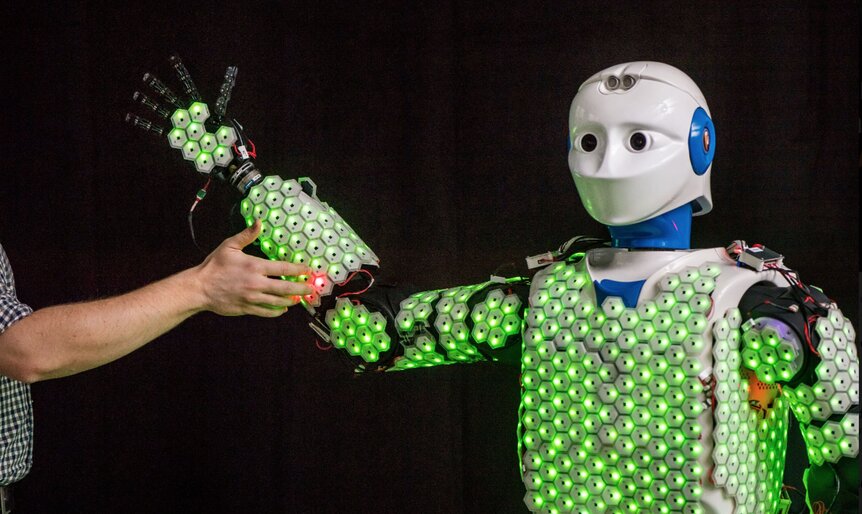
Bergner's unit attached their glowing e-skin modules on a human-sized robot that they named H-1, covering its entire body using 1260 skin cells containing more than 10,000 sensors in a first-ever type of full body application.
"The H1 robot operates autarkically with onboard systems only," Bergner explained further. "Covering it with skin cells has only been possible thanks to the benefits of our novelty-driven e-skin, which reduces the computational load by around 80%. A more traditional e-skin would have completely saturated the systems of H1, resulting in delays and a continuous information loss of around 25%."
Bergner and his colleagues have taken a remarkable leap in designing efficient e-skin that might one day allow for the creation of an entirely new model of robots armed with enhanced powers of touch. Besides amping up the level of safety involved with human-robot interactions in industrial applications, these sensitive sensors could be employed in the invention of next-gen prostheses, medical tools, and peripheral smart devices into the 21st century and beyond.