Create a free profile to get unlimited access to exclusive videos, sweepstakes, and more!
Future robots could wear suits made of human skin
As long as they grow it themselves, we're cool.

In the 1987 film RoboCop, Alex Murphy is fatally wounded, and his body merged with mechanical elements to create the titular RoboCop, intended to be the perfect embodiment of law enforcement with a priority on protecting the innocent. The film was successful enough that it spawned two feature film sequels and a television series (now streaming on Peacock!).
While the citizens of the fictional future Detroit were enamored with RoboCop, we can’t help but wonder if a mechanized police presence wouldn’t conjure some justifiable distrust in the real world. If only we could take a page out of the Terminator playbook and cover our robots in human skin. Now, with the help of new research, we can!
Shoji Takeuchi and colleagues from the Department of Mechano-Informatics and the Graduate School of Information Science and Technology at the University of Tokyo have developed a method for coating a robotic finger with living human skin. Their findings were published in the journal Matter. Scientists believe a new class of skin-covered robots could more effectively interact with their human counterparts.
“There are three benefits to using living cells as a coating material for robots. First, by using the same skin material as humans, a more human-like appearance can be achieved. Second, the biological properties of cells can be used to provide robot skin with multimodal and multichannel sensing capabilities, self-repair capabilities, and metabolic capabilities that are difficult to achieve with artificial materials alone. Third, by using biological materials, robots can be made more environmentally friendly,” Takeuchi told SYFY WIRE.
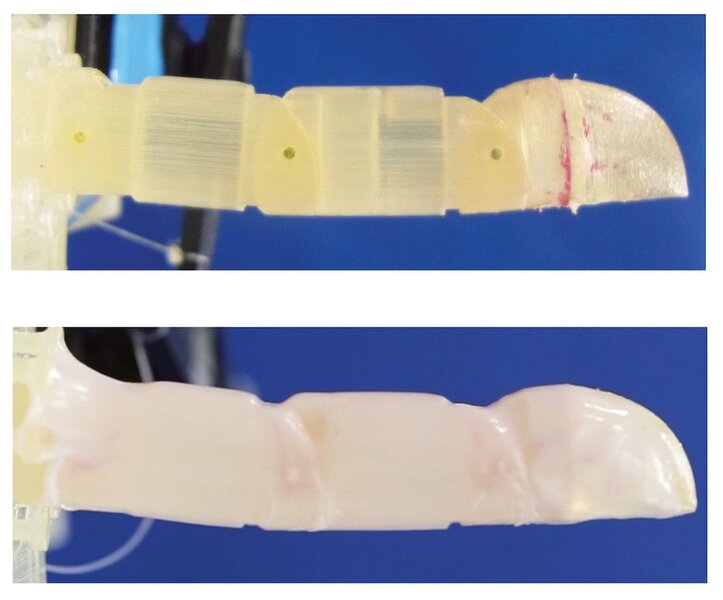
To get the skin onto the robotic appendage, scientists submerged it in a combination of collagen and human skin cells. Over time, the mixture attached itself to the finger, creating a first layer of skin. A second liquid containing keratinocyte cells — the dominant cells found in the epidermis — was then applied creating an outer layer. After a couple of weeks, the robotic finger had skin which was comparable in width to our own. Previous studies grew skin-like structures separately and later applied them to a synthetic surface. This new strategy has benefits over previous methods, in that it allows for the application of skin over uneven surfaces
“We found that we could adapt the skin to the curved 3D surface shape by culturing it on site, rather than making it elsewhere and attaching it to the surface. By installing an appropriate anchor structure, the entire surface could be covered,” Takeuchi said.
At present, the skin does not deliver any sensory information to the robot, but the team is working on incorporating a nervous system for just that purpose. The skin also doesn’t include any circulatory system for delivering nutrients to the tissue. As a result, it needed external assistance to acquire nutrients and for the removal of waste products. That means it spent a considerable portion of its time in a bath of sugars and amino acids.
“We are conceiving strategies to build circulatory systems within the skin. Another challenge is to develop more sophisticated skin with skin-specific functions by reproducing various organs in the skin such as sensory neurons, hair follicles, nails, and sweat glands,” Takeuchi said.
That’s not to say the skin isn’t impressive even as it exists today. The current version was able to stretch with the finger as it bent or straightened and even healed itself after injury. Researchers made a small cut on the surface of the finger and then applied a collagen bandage. The cells of the skin then connected to the bandage and incorporated it into the skin, healing the wound.
Of course, the process will need to be scaled up if researchers hope to cover an entire humanoid robot in convincing human skin. A robot with disconnected pieces of skin might be even more terrifying to its human acquaintances than one with no skin at all. Now, that would be a dystopian nightmare better left to our fictions.