Create a free profile to get unlimited access to exclusive videos, sweepstakes, and more!
PitRanger rover prototype poised to plunge into the Moon's subterranean secrets

Hoping to fearlessly investigate some of the more hazardous landscape features on the Moon, a new breed of pit-exploring lunar rover is currently being developed by scientists at the Robotics Institute at Carnegie Mellon University in Pittsburgh.
Sometimes known as skylights, these steep-walled holes may act as thresholds to a vast network of extended, subsurface lava tubes and caves that formed billions of years ago when the Moon was undergoing geological upheavals. By exploring this subterranean territory, this next generation of sturdy surface vehicles might find underground caverns that future astronauts can utilize for protection and shelter from radiation and other dangerous elements.
"Caves, if accessible, could be havens from radiation, temperature extremes and micrometeorite hazards of the moon's surface," said William "Red" Whittaker, a research professor at Carnegie Mellon University.

Whittaker has been at the forefront of engineering mobile robots capable of operating in off-Earth environments. He offered his thoughts on the progress of engineering short-lived rovers able to dive into the Moon's deep pits at this fall's virtual meeting for NASA's Innovative Advanced Concepts (NIAC) Program. Whittaker and his team are currently engaged in creating a terrestrial prototype of a 33-pound lunar micro-rover aptly called PitRanger.

"Lunar skylights are windows to great unknowns both within and below the Moon's surface," Whittaker noted. "Micro-rover pit exploration is affordable and viable in the near term."
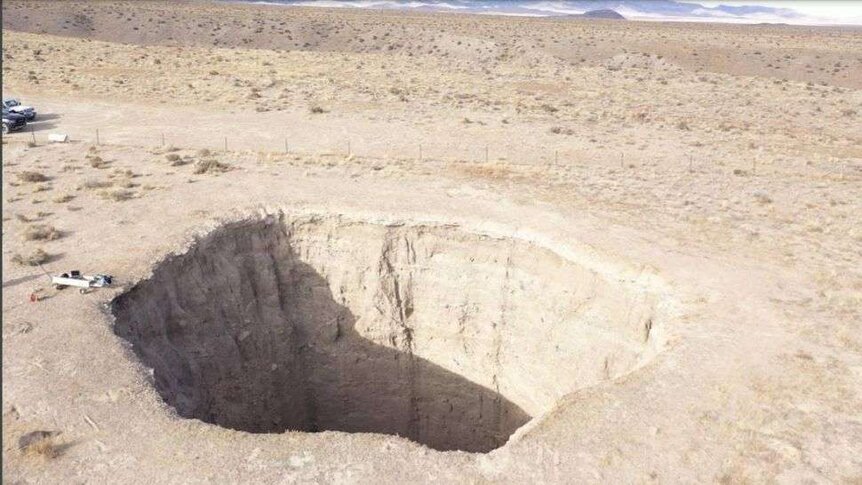
To provide a pit facsimile to further the robot's ultimate design and capacities, scientists modeled and measured a pit on Earth, then created a photogrammetric model from 10,000 rover-perspective images obtained from 26 locations around the 330-feet deep West Desert Sinkhole in Utah.
The PitRanger rover is also equipped with a telephoto camera and a pan unit placed atop its solar panel. Its average top speed will be one inch per second. Plans call for the subsurface vehicle to select and pre-process the best images captured of a lunar pit and then deliver the data back to the lander for final modeling. This process would include multiple trips back to the pit to obtain more snapshots and additional measurements.
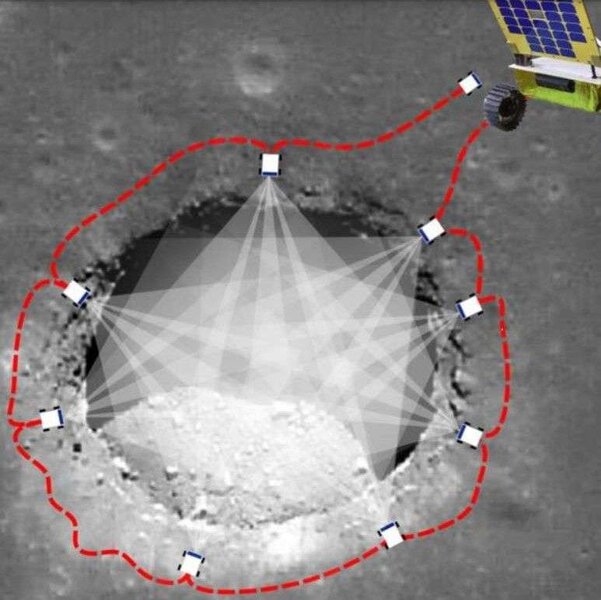
"Rovers for moon pit exploration missions must necessarily be distinct from those that have come before ... They must be compatible with small landers and be able to negotiate steep pit aprons, provide powerful computing and obtain the required cross-pit images," Whittaker explained. "The scenario is to rove to a pit with a micro-rover, peer into the pit, acquire images of walls, floors, caverns, and then generate pit models. Autonomy for fast exploration is the critical technology since the small, solar-powered rovers won't be able to carry direct-to-Earth radio for supervision or guidance."
PitRanger would be fortified with a full complement of autonomous software, enabling it to make educated logistics and imaging decisions for the best vantage points around each candidate pit.
"The result of all this work would be a stunning, up-close profile of the targeted lunar pit, a far superior look-see compared to a moon-circling orbiter," Whittaker added. "Pit walls offer the only observable pristine geology on the Moon. They are unique opportunities to observe volcanology, morphology and much more. It is a little bit like taking Alexander Graham Bell's first telephone and getting it into the cell phones we all carry around."