Swiss researcher develops unreal robot hand that levitates objects

Proving once again that truth is often stranger than fiction, a Swiss researcher has recently developed an astonishing new type of robotic hand that can actually lift small items via invisible sound waves. While it might appear to be a clever conjuror's trick, it's really employing an old invention called ultrasonic levitation, whereby objects are captured and levitated using the sorcery of science.
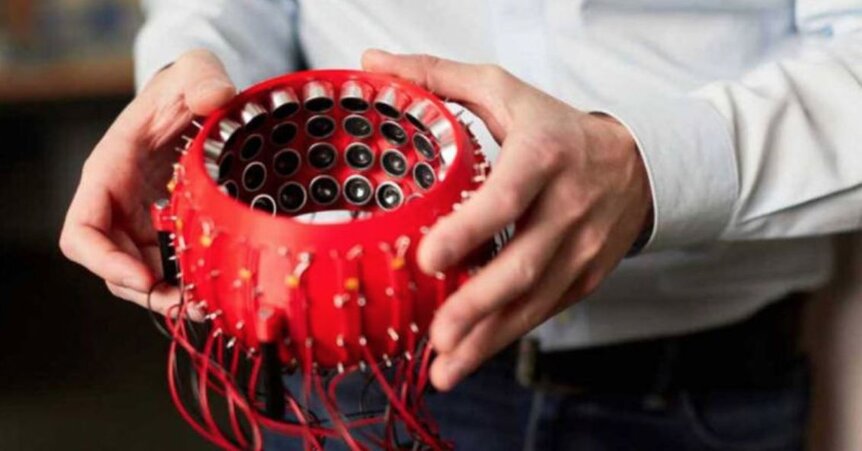
Researcher Marcel Schuck of the Swiss Federal Institute of Technology in Zurich is utilizing a strange phenomenon whose history dates back 80 years, but fusing the technology into modern robotics applications. Schuck's initial touchless gripper resembles a halved gourd attached to a network of wires and containing dozens of miniature loudspeakers.
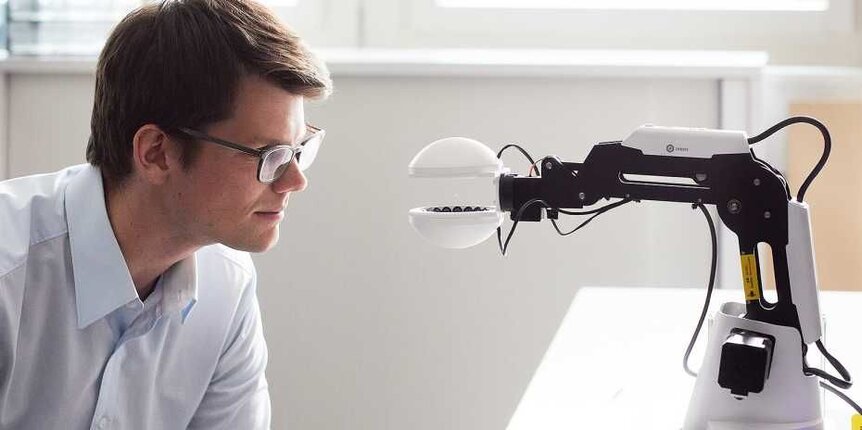
The finished prototype is comprised of two semi-spheres resembling a pair of children's stereo headphones, both connected to a circuit board fitted with microchips and attached to a standard robot arm. By controlling the sound waves emitted from the tiny speakers via customized software, researchers are able to levitate and direct a small object between the two halves of the sphere without ever touching it.
Acoustic levitation is an effect that takes advantage of the physical properties of sound to cause solids, liquids, and heavy gases to float. As sound waves travel they naturally push and pull molecules around them.
This explains why, in the absence of this molecular movement, as in the vacuum of space, there's no one there to hear you scream. Acoustic levitation utilizes the method of intense sound traveling through a fluid (usually a gas) to create an equilibrium in the natural forces of gravity, causing objects to magically float unsupported in midair via the sonic disruption.
Shuck's No-Touch Robotics project has many potential practical applications in the medical, computer science, and aerospace fields where the gripping of very small, fragile parts is essential. And being based in Switzerland and its long legacy of fine precision watchmaking, the "light touch" invention could be especially beneficial.
“Toothed gearwheels, for example, are first coated with lubricant, and then the thickness of this lubricant layer is measured,” Shuck said in a press release. “Even the faintest touch could damage the thin film of lubricant.”
His visionary team at ETH Zurich plans to move the invention beyond the lab and develop the prototype further into a more refined, real-world product. They're currently creating a development kit for potential clients, application partners, and interested investors containing a robot gripper, control software, and instruction manual to be distributed sometime in 2021.
Interested parties can contact Marcel Schuck and his crew at ETH Zurich HERE.




















")
![Stranger Things Season 5: Nell Fisher Details Joining Cast as Holly Wheeler [Exclusive]](/sites/syfy/files/styles/6_col_video/public/media_mpx/thumbnails/dhwkj3fo7vbn0.cloudfront.net/image/BWT3_TVE_-_Syfy/483/989/20251224_THUMB_NELL_FISHER_INTV.jpg "Stranger Things Season 5: Nell Fisher Details Joining Cast as Holly Wheeler [Exclusive]")